The Control Team is responsible of designing the control systems that steer the WAM-V with precision and autonomy. Working closely with the Electrical and Software teams, they develop control loops that enable the vessel to make accurate decisions in real-time, ensuring smooth navigation.
Key Systems and Projects
PID Controller
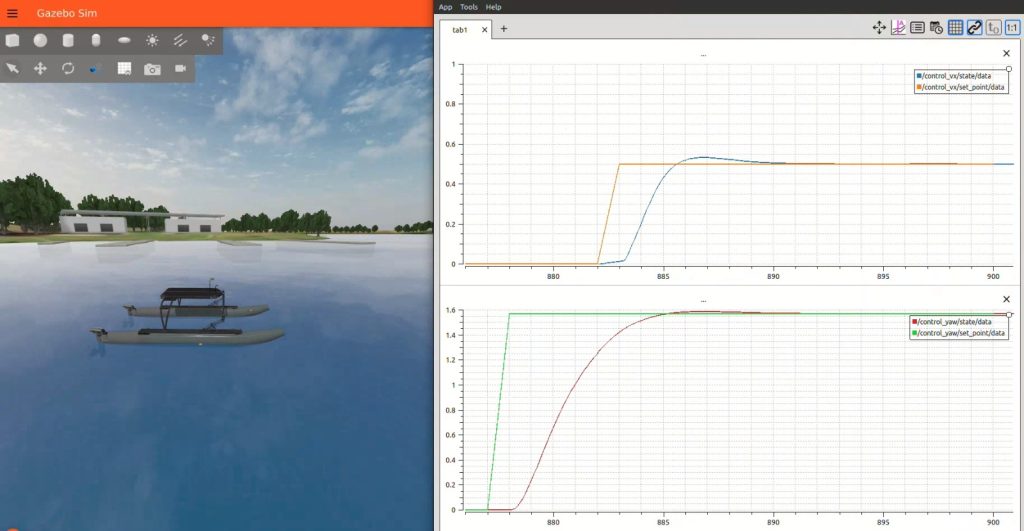
A PID controller was developed to regulate speed and angular orientation of the WAM-V.
Our control team first tested the PID controller on the Virtual RobotX Simulator and then in our field tests. They analyzed the data collected in these two environments to adjust the PID controller and ensure precise and stable control.
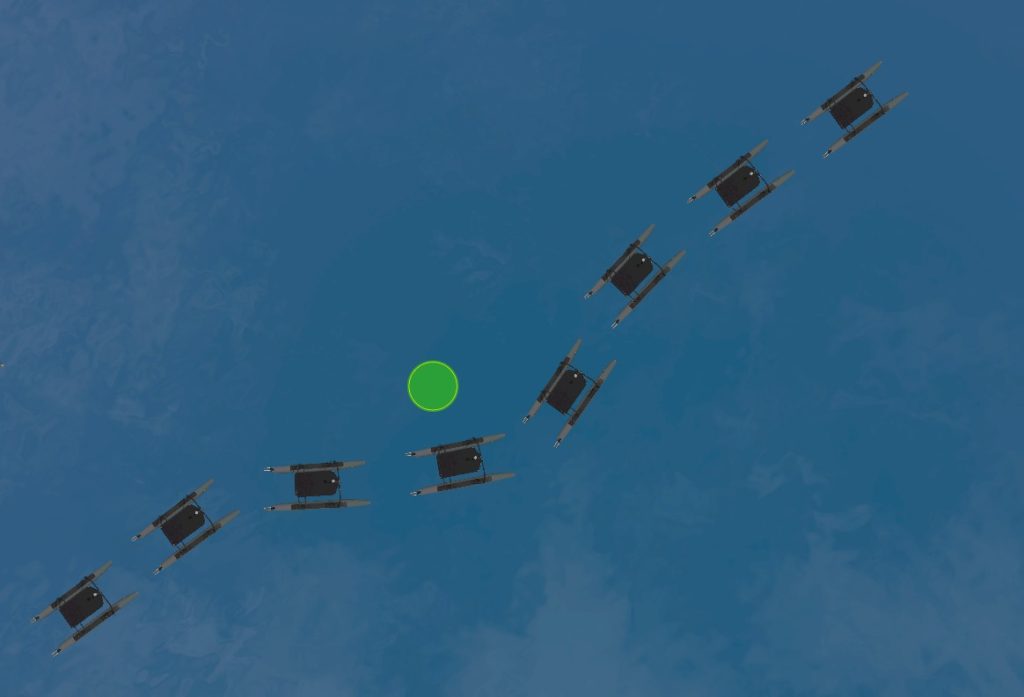
Reactive Control for Obstacle Avoidance
To prevent the WAM-V from colliding with obstacles during navigation, a reactive control submodule was developed. This allows the system to detect and avoid obstacles in real time, enhancing the vehicle’s autonomy in dynamic environments.
The reactive control was also tested in both the Virtual RobotX Simulator and field tests, allowing for adjustments based on the data collected.